MicroPython running on a Teensy 3.1 controlling a DragonTail
I signed up for the MicroPython Kickstarter with the idea that it would be cool to use python for low-level control of a robot.
While I’m waiting for the MicroPython board to arrive, I started to play with a Teensy 3.1, which is a small 32-bit ARM based controller with 256K of flash and 64K of RAM.
I decided to try to port MicroPython to run on the teensy, and most of my progress so far has been checked into the MicroPython github repoitory.
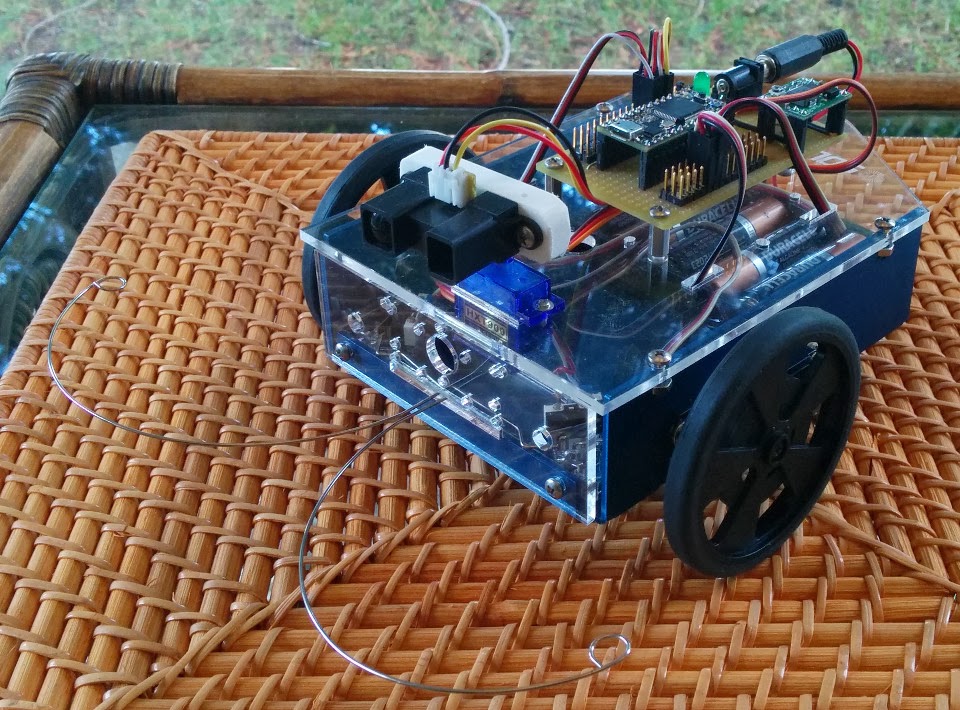
Wanting to see a robot running MicroPython, I put together the Solarbotics DragonTail Deluxe Kit along with the Electronics Bundle, but I replaced the Arduino controller with the Teensy 3.1.
Here’s a photo of the bot:
An this is a closeup of the Teensy 3.1 Breakout I whipped up:
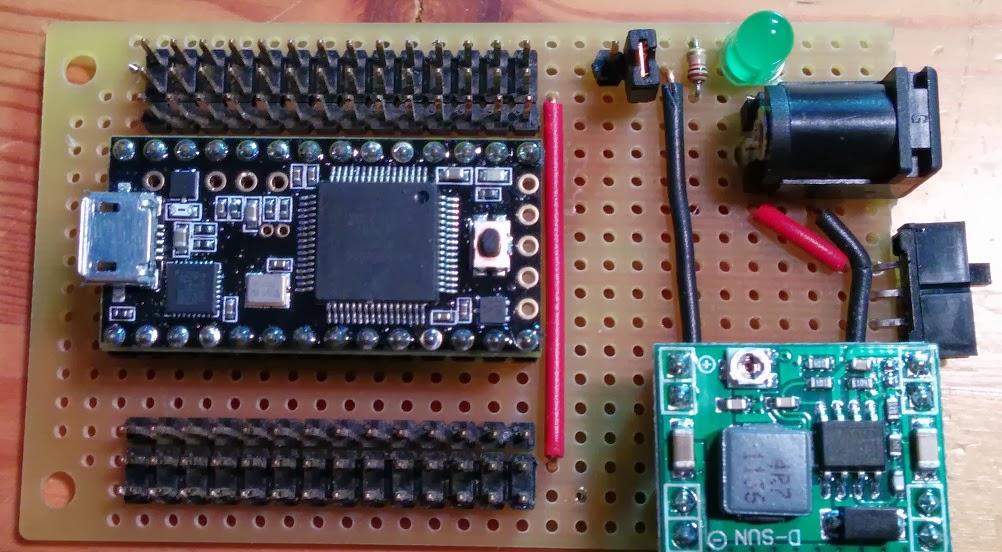
The header strips are GVS (Ground-Voltage-Signal). The outermost row is ground, the middle row is 5v, and the inside row is signal. Since most of the signals on the top side (relative to the picture) are analog, I made the ground on that side be AGND. The jumper just to the left of green LED allows me to connect the digital ground through to the analog ground if I need to. The small green board in the bottom right is a DC-DC Switching Regulator I got on eBay.
I put a short video of the bot running on YouTube.
The python source running under MicroPython can be found in my DragonTail github repository.